点对点设计
节点单元
分布式网络
RPC+TCP/UDP通信
多机协同
多语言支持
python、C++、Java、lisp等
语言无关的接口定义
架构精简、集成度高
每个节点可以单独编译
集成众多开源项目:OpenCV、PCL、OpenRAVE、OpenNI
接口统一、提高软件复用性
组件化工具
3D可视化:rviz
物理仿真环境:gazebo
数据记录工具:rosbag
Qt工具箱:rqt_*
免费且开源
节点(Node):软件模块
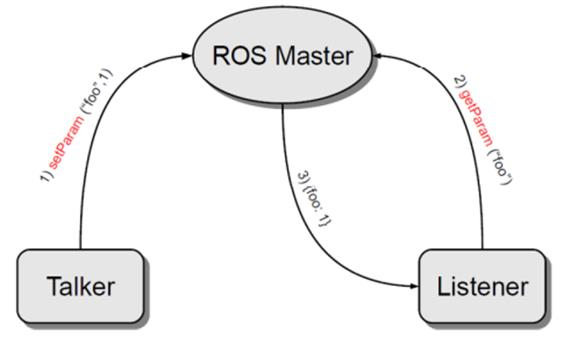
节点管理器(ROS Master):控制中心,提供参数管理
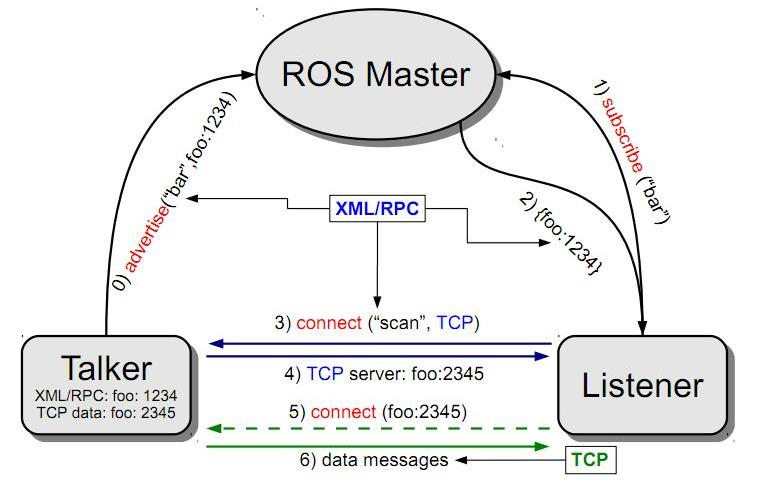
话题(Topic):异步通信机制,传输消息
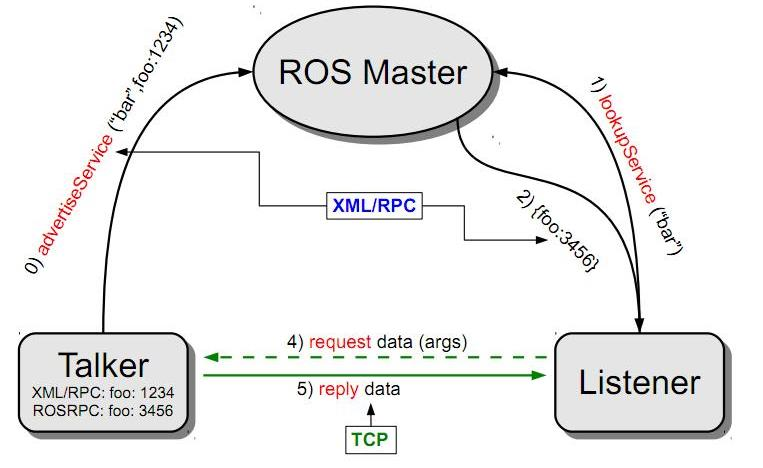
服务(Service):同步通信机制,双向通信,传输请求/应答数据
Talker注册
Listener注册
ROS Master进行信息分配
Listener发送连接请求
Talker确认连接请求
建立网络连接
Talker向Listener发布数据
Talker注册
Listener注册
ROS Master进行信息分配
建立网络连接
Talker向Listener发布服务应答数据
Talker设置变量
Listener查询参数值
ROS Master向Listener发送参数值
类别
话题
服务
同步性
异步
同步
通信模型
发布/订阅
C/S
底层协议
ROS TCP/ROS UDP
ROS TCP/ROS UDP
反馈机制
无
有
缓冲区
有
无
实时性
弱
强
节点关系
多对多
一对多
使用场景
数据传输
逻辑处理
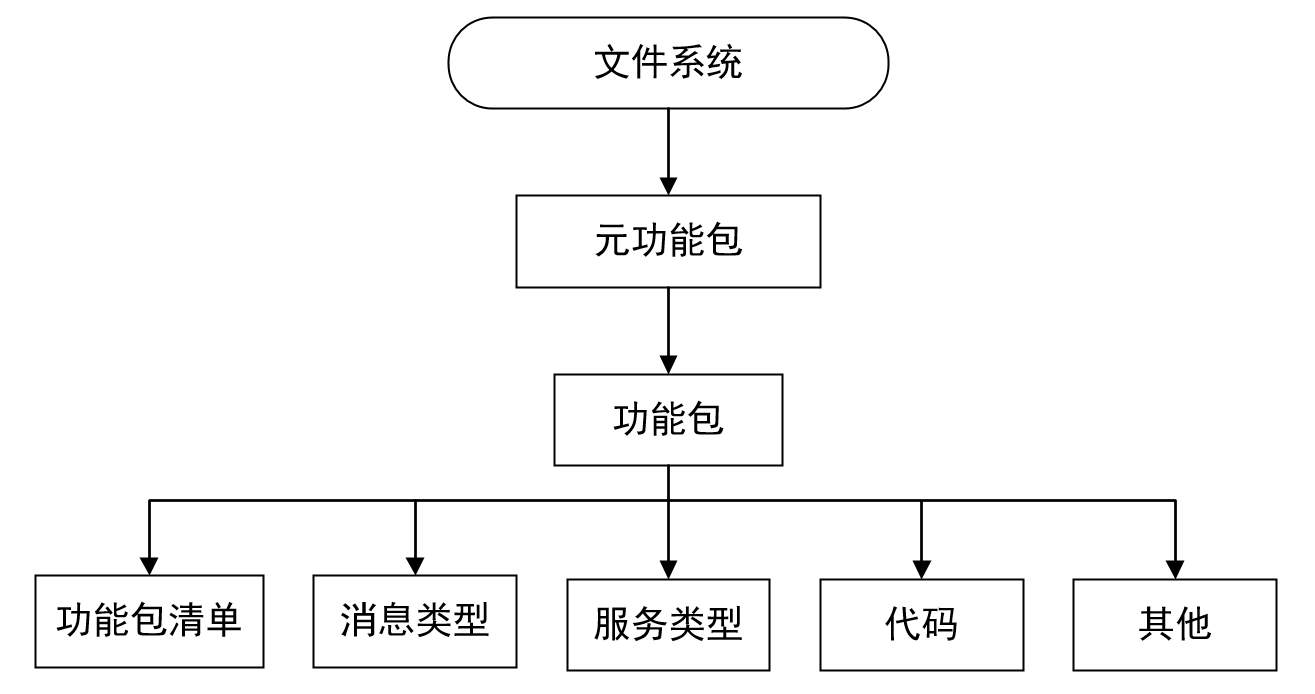
文件
功能说明
功能包清单(Package manifest)
记录功能包的基本信息,包含作者、许可、依赖、编译标志等
元功能包(Meta Packages)
组织多个用于同一目的的功能包
元功能包清单(Meta Packages)
类似于功能包清单,还包含运行时需要依赖的功能包或者声明一些应用标签
消息类型(Message)
ROS节点间发布/订阅的通信信息,可以使用ROS系统提供的消息类型,也可以使用.msg文件在功能包的msg文件夹下自定义需要的消息类型
服务类型(Service)
定义ROS服务器/客户端通信模型下的请求与应答数据类型,可以使用ROS系统提供的服务类型,也可以.srv文件在功能包的srv文件夹中进行定义
代码(Code)
放置功能包节点源代码的文件夹
发行版(Distribution)
软件源(Repository)
ROS wiki
邮件列表(Mailing list)
ROS Answer
博客
查看容器linux版本:cat /etc/issue
官方安装教程 ,选择合适的安装版本也可以使用docker,下载ros的镜像,教程
安装步骤
说明
docker环境
docker pull ubuntu:16.04docker run -itd ubuntu:16.04 /bin/bashdocker exec -it /bin/bash
设置sources.list
apt update sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'cat /etc/lsb-release查看DISTRIB_CODENAME,确定是xenial,填进上面命令中:sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu xenial main" > /etc/apt/sources.list.d/ros-latest.list'
设置key
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
更新package
sudo apt update
安装ROS kinetic完整版
sudo apt install -y ros-kinetic-desktop-full,时间略长
初始化rosdep
sudo rosdep initrosdep update
配置ROS环境
echo 'source /opt/ros/kinetic/setup.bash' >> /root/.bashrc && source /root/.bashrc
安装依赖项
sudo apt install python-rosinstall python-rosinstall-generator python-wstool build-essential
测试ROS是否安装成功
小海龟仿真
小海龟仿真:开启三个terminal,分别执行下面的指令,可以控制小乌龟运动
roscore rosrun turtlesim turtlesim_node rosrun turtlesim turtle_teleop_key rosrun rqt_graph rqt_graph
安装步骤
说明
添加 sources.list
设置你的电脑可以从 packages.ros.org 接收软件:sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
添加 keys
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
安装
首先,确保你的Debian软件包索引是最新的:sudo apt update
安装桌面完整版
包含ROS、rqt、rviz、机器人通用库、2D/3D 模拟器、导航以及2D/3D感知:sudo apt install ros-noetic-desktop-full
环境配置
echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc && source ~/.bashrc
至此已经在Ubuntu20.04的系统中完整安装ROS Noetic。
Mastering ROS for Robotics Programming
命令
说明
catkin_create_pkg
创建功能包
rospack
获取功能包信息
catkin_make
编译工作空间中的功能包
rosdep
自动安装功能包依赖的其他包
roscd
功能包目录跳转
roscp
拷贝功能包中的文件
rosed
编辑功能包中的文件
rosrun
运行功能包中的可执行文件
roslaunch
运行启动文件
workspace是一个存放工程开发相关文件的文件夹
目录
说明
src
代码空间(source)
build
编译空间(build)
devel
开发空间(develpment)
install
安装空间(install)
创建空间
说明
创建目录
mkdir -p ~/catkin_ws/src && cd ~/catkin_ws/src && catkin_init_workspace
编译空间
cd ~/catkin_ws/ && catkin_make
环境变量
source devel/setup.bash
检查
echo $ROS_PACKAGE_PATH
创建功能包
catkin_create_pkg 功能包名称 depend1 depend2 ...
创建功能包
说明
创建功能包
cd ~/catkin_ws/src && catkin_create_pkg learning_comm std_msgs rospy roscpp
编译功能包
cd ~/catkin_ws && cakin_make && source ~/catkin_ws/devel/setup.bash
在同一个工作空间,功能包名称唯一,但是多个工作空间中功能包名可能相同。
ros实行的是Overlaying机制,按照环境变量中ROS_PACKAGE_PATH设置的顺序依次查找功能包所在路径
查找功能包路径:rospack find learning_comm
流程:
创建发布者
创建订阅者
添加编译选项
运行可执行程序
int main (int argc, char **argv) ros::init(argc, argv, "talker" ); ros::NodeHandle n; ros::Publisher chatter_pub = n.advertise<std_msgs::String>("chatter" , 1000 ); ros::Rate loop_rate (10 ) ; int count = 0 ; while (ros::ok()) { std_msgs::String msg; std ::stringstream ss; ss << "hello world " << count; msg.data = ss.str(); ROS_INFO("%s" , msg.data.c_str()); chatter_pub.publish(msg); ros::spinOnce(); loop_rate.sleep(); ++count; } return 0 ; }
void chatterCallback (const std_msgs::String::ConstPtr& msg) ROS_INFO("I heard: [%s]" , msg->data.c_str()); } int main (int argc, char **argv) ros::init(argc, argv, "listener" ); ros::NodeHandle n; ros::Subscriber sub = n.subscribe("chatter" , 1000 , chatterCallback); ros::spin(); return 0 ; }
修改功能包项目目录下的vi ~/catkin_ws/src/learning_comm/CMakeList.txt文件,增加编译选项,
add_executable(talker src/talker.cpp) target_link_libraries(talker ${catkin_LIBRARIES}) add_executable(listener src/listener.cpp) target_link_libraries(listener ${catkin_LIBRARIES})
在工作空间路径下,执行cd ~/catkin_ws/ && catkin_make
启动roscore
执行:rosrun learning_comm talker,rosrun learning_comm listener
创建person.msg文件,一般放在功能包下的msg文件夹下
string nameuint8 sex uint8 age uint8 unknown=0 uint8 male=1 uint8 female=2
<build_depend > message_generation</build_depend > <exec_depend > message_runtime</exec_depend >
find_package(... message_generation) catkin_package(CATKIN_DEPENDS geometry_msgs roscpp rospy std_msgs message_runtime) add_message_files(FILES person.msg) generate_messages(DEPENDENCIES std_msgs)
rosmsg show person可以查看到自定义内容,就可以包含头文件使用了
流程:
创建服务器
创建客户端
添加编译选项
运行可执行程序
定义srv文件,与msg一样,在功能包中创建srv文件夹,添加AddTwoInts.srv文件
int64 a int64 b --- int64 sum
---分割了输入和输出数据
在package.xml添加功能包依赖
<build_depend > message_generation</build_depend > <exec_depend > message_runtime</exec_depend >
find_package(... message_generation) catkin_package(CATKIN_DEPENDS geometry_msgs roscpp rospy std_msgs message_runtime) add_service_files(FILES AddTwoInts.srv)
bool add (learning_comm::AddTwoInts::Request &req, learning_comm::AddTwoInts::Response &res) res.sum = req.a + req.b; ROS_INFO("request: x=%ld, y=%ld" , (long int )req.a, (long int )req.b); ROS_INFO("sending back response: [%ld]" , (long int )res.sum); return true ; } int main (int argc, char **argv) ros::init(argc, argv, "add_two_ints_server" ); ros::NodeHandle n; ros::ServiceServer service = n.advertiseService("add_two_ints" , add); ROS_INFO("Ready to add two ints." ); ros::spin(); return 0 ; }
int main (int argc, char **argv) ros::init(argc, argv, "add_two_ints_client" ); if (argc != 3 ) { ROS_INFO("usage: add_two_ints_client X Y" ); return 1 ; } ros::NodeHandle n; ros::ServiceClient client = n.serviceClient<learning_comm::AddTwoInts>("add_two_ints" ); learning_comm::AddTwoInts srv; srv.request.a = atoll(argv[1 ]); srv.request.b = atoll(argv[2 ]); if (client.call(srv)) { ROS_INFO("Sum: %ld" , (long int )srv.response.sum); } else { ROS_ERROR("Failed to call service add_two_ints" ); return 1 ; } return 0 ; }
修改功能包项目目录下的vi ~/catkin_ws/src/learning_comm/CMakeList.txt文件,增加编译选项,
add_executable(server src/server.cpp) target_link_libraries(server ${catkin_LIBRARIES}) add_dependencies(server ${PROJECT_NAME}_gencpp) add_executable(client src/client.cpp) target_link_libraries(client ${catkin_LIBRARIES}) add_dependencies(client ${PROJECT_NAME}_gencpp)
在工作空间路径下,执行cd ~/catkin_ws/ && catkin_make
启动roscore
执行:rosrun learning_comm server,rosrun learning_comm client
动作(action):是一种问答通信值,带有连续反馈,可以再任务过程中运行的基于ROS消息机制的实现
Action接口
说明
goal
发布任务目标
cancel
请求取消任务
status
通知客户端当前状态
feedback
周期反馈任务运行的监控数据
result
向客户端发送任务的执行结果,只发送一次
定义action文件,在功能包中创建action文件夹,添加DoDishes.action文件
uint32 dishwasher_id --- uint32 total_dishes_cleaned --- float32 percent_complete
<build_depend > actionlib</build_depend > <build_depend > actionlib_msgs</build_depend > <exec_depend > actionlib</exec_depend > <exec_depend > actionlib_msgs</exec_depend >
find_package(actionlib_msgs actionlib) add_action_files(DIRECTORY action FILES DoDishes.action) generate_messages(DEPENDENCIES actionlib_msgs)
typedef actionlib::SimpleActionServer<learning_comm::DoDishesAction> Server;void execute (const learning_comm::DoDishesGoalConstPtr& goal, Server* as) ros::Rate r (1 ) ; learning_comm::DoDishesFeedback feedback; ROS_INFO("Dishwasher %d is working." , goal->dishwasher_id); for (int i=1 ; i<=10 ; i++) { feedback.percent_complete = i * 10 ; as->publishFeedback(feedback); r.sleep(); } ROS_INFO("Dishwasher %d finish working." , goal->dishwasher_id); as->setSucceeded(); } int main (int argc, char ** argv) ros::init(argc, argv, "do_dishes_server" ); ros::NodeHandle n; Server server (n, "do_dishes" , boost::bind(&execute, _1, &server), false ) ; server.start(); ros::spin(); return 0 ; }
typedef actionlib::SimpleActionClient<learning_comm::DoDishesAction> Client;void doneCb (const actionlib::SimpleClientGoalState& state, const learning_comm::DoDishesResultConstPtr& result) ROS_INFO("Yay! The dishes are now clean" ); ros::shutdown(); } void activeCb () ROS_INFO("Goal just went active" ); } void feedbackCb (const learning_comm::DoDishesFeedbackConstPtr& feedback) ROS_INFO(" percent_complete : %f " , feedback->percent_complete); } int main (int argc, char ** argv) ros::init(argc, argv, "do_dishes_client" ); Client client ("do_dishes" , true ) ; ROS_INFO("Waiting for action server to start." ); client.waitForServer(); ROS_INFO("Action server started, sending goal." ); learning_comm::DoDishesGoal goal; goal.dishwasher_id = 1 ; client.sendGoal(goal, &doneCb, &activeCb, &feedbackCb); ros::spin(); return 0 ; }
修改功能包项目目录下的vi ~/catkin_ws/src/learning_comm/CMakeList.txt文件,增加编译选项,
add_executable(DoDishes_server src/DoDishes_server.cpp) target_link_libraries(DoDishes_server ${catkin_LIBRARIES}) add_dependencies(DoDishes_server ${${PROJECT_NAME}_EXPORTED_TARGETS}) add_executable(DoDishes_client src/DoDishes_client.cpp) target_link_libraries(DoDishes_client ${catkin_LIBRARIES}) add_dependencies(DoDishes_client ${${PROJECT_NAME}_EXPORTED_TARGETS})
在工作空间路径下,执行cd ~/catkin_ws/ && catkin_make
启动roscore
执行:rosrun learning_comm server,rosrun learning_comm client
ROS是一种分布式软件框架,节点之间通难过松耦合的方式进行组合
记录每台服务器的ip地址:ipconfig,可以通过/etc/hosts文件进行映射xx.xx.xx.x s1,使用ping s1查看是否连通
多台分布式服务中,只有一台是ROS Master,其余服务必须设置ROS Master的IP到环境变量:echo "export ROS_MASTER_URI=http://s1:11311" >> ~/.bashrc
launch |--node |--param |--rosparam |--arg
标签
说明
launch
根元素
node
启动节点,属性:
param
设置ROS系统运行中的参数,储存在参数服务器中,属性
rosparam
加载参数文件中多个参数:<rosparam file="params.yaml" command="load" ns="params" />
arg
launch文件内部的局部变量,仅限于launch文件使用,<arg name="arg-name" default="arg-value" /><param name="foo" value="$(arg arg-name)">。属性
remap
重映射ROS计算图资源的命名:<remap from="/turtlebot/cmd_vel" to="/cmd_vel" />,属性:
include
包含其他launch文件,<include file="$(dirname)/other.launch" />,属性:
<launch > <node pkg ="turtlesim" type ="turtlesim_node" name ="sim" /> <node pkg ="turtlesim" type ="turtle_teleop_key" name ="teleop" output ="screen" /> <node pkg ="learning_tf" type ="turtle_tf_broadcaster" args ="/turtle1" name ="turtle1_tf_broadcaster" /> <node pkg ="learning_tf" type ="turtle_tf_broadcaster" args ="/turtle2" name ="turtle2_tf_broadcaster" /> <node pkg ="learning_tf" type ="turtle_tf_listener" name ="listener" /> </launch >
TF可以提供和管理机器人相关的坐标变换、位置等信息的计算。
实现TF坐标变换的方式:广播TF变换、监听TF变换
#include <ros/ros.h> #include <tf/transform_broadcaster.h> #include <turtlesim/Pose.h> std ::string turtle_name;void poseCallback (const turtlesim::PoseConstPtr& msg) static tf::TransformBroadcaster br; tf::Transform transform; transform.setOrigin( tf::Vector3(msg->x, msg->y, 0.0 ) ); tf::Quaternion q; q.setRPY(0 , 0 , msg->theta); transform.setRotation(q); br.sendTransform(tf::StampedTransform(transform, ros::Time::now(), "world" , turtle_name)); } int main (int argc, char ** argv) ros::init(argc, argv, "my_tf_broadcaster" ); if (argc != 2 ) { ROS_ERROR("need turtle name as argument" ); return -1 ; }; turtle_name = argv[1 ]; ros::NodeHandle node; ros::Subscriber sub = node.subscribe(turtle_name+"/pose" , 10 , &poseCallback); ros::spin(); return 0 ; };
#include <ros/ros.h> #include <tf/transform_listener.h> #include <geometry_msgs/Twist.h> #include <turtlesim/Spawn.h> int main (int argc, char ** argv) ros::init(argc, argv, "my_tf_listener" ); ros::NodeHandle node; ros::service::waitForService("spawn" ); ros::ServiceClient add_turtle = node.serviceClient<turtlesim::Spawn>("spawn" ); turtlesim::Spawn srv; add_turtle.call(srv); ros::Publisher turtle_vel = node.advertise<geometry_msgs::Twist>("turtle2/cmd_vel" , 10 ); tf::TransformListener listener; ros::Rate rate (10.0 ) ; while (node.ok()) { tf::StampedTransform transform; try { listener.waitForTransform("/turtle2" , "/turtle1" , ros::Time(0 ), ros::Duration(3.0 )); listener.lookupTransform("/turtle2" , "/turtle1" , ros::Time(0 ), transform); } catch (tf::TransformException &ex) { ROS_ERROR("%s" ,ex.what()); ros::Duration(1.0 ).sleep(); continue ; } geometry_msgs::Twist vel_msg; vel_msg.angular.z = 4.0 * atan2 (transform.getOrigin().y(), vel_msg.linear.x = 0.5 * sqrt (pow (transform.getOrigin().x(), 2 ) + pow (transform.getOrigin().y(), 2 )); turtle_vel.publish(vel_msg); rate.sleep(); } return 0 ; };
add_executable(turtle_tf src/turtle_tf.cpp) target_link_libraries(turtle_tf ${catkin_LIBRARIES})
工具
说明
rqt_console
日志输出工具
rqt_graph
计算图可视化工具
rqt_plot
数据绘图工具
rqt_reconfigure
参数动态配置工具
Rviz是一款三维可视化工具,可以很好的兼容基于ROS软件框架的机器人平台
启动:rosrun rviz
三维物理仿真平台,可以用测测试机器人算法,带有物理属性
启动:roslaunch gazebo_ros empty_world.launch
下载:sudo apt-get install ros-kinetic-usb-cam
打开示例:roslaunch usb_cam usb_cam-test.launch
使用Qt查看主题:rqt_image_view
主题:~<camera_name>/image,类型:sensor_msgs/Image
参数
类型
默认值
描述
~video_device
string
“/dev/video0”
摄像头设备号
~image_width
int
640 图像横向分辨率
~image_height
int
480 图像纵向分辨率
~pixel_format
string
“mjpeg”
像素编码,可选值: mjpeg, yuyv, uyvy
~io_method
string
“mmap”
IO通道,可选值: mmap, read, userptr
~camera_frame_id
string
“head_camera”
摄像头坐标系
~framerate
int
30
帧率
~brightness
int
32
亮度, 0~255
~saturation
int
32
饱和度, 0~255
~contrast
int
32
对比度, 0~255
~sharpness
int
22
清晰度, 0~255
~autofocus
bool
false
自动对焦
~focus
int
51
焦点(非自动对焦状态下有效)
~camera_info_url
string
-
摄像头校准文件路径
~camera_name
string
“head_camera”
摄像头名称
<launch > <node name ="usb_cam" pkg ="usb_cam" type ="usb_cam_node" output ="screen" > <param name ="video_device" value ="/dev/video0" /> <param name ="image_width" value ="640" /> <param name ="image_height" value ="480" /> <param name ="pixel_format" value ="yuyv" /> <param name ="camera_frame_id" value ="usb_cam" /> <param name ="io_method" value ="mmap" /> </node > <node name ="image_view" pkg ="image_view" type ="image_view" respawn ="false" output ="screen" > <remap from ="image" to ="/usb_cam/image_raw" /> <param name ="autosize" value ="true" /> </node > </launch >
sudo apt-get install ros-kinetic-freenect-* git clone https://github.com/avin2/SensorKinect.git cd SensorKinect/Bintar xvf SensorKinect093-Bin-Linux-x86-v5.1.2.1.tar.bz2 tar xvf SensorKinect093-Bin-Linux-x64-v5.1.2.1.tar.bz2 sudo ./install.sh
话题名称
类型
描述
rgb/camera_info
sensor_msgs/CameraInfo
RGB相机校准信息
rgb/image_raw
sensor_msgs/Image
RGB相机图像数据
depth/camera_info
sensor_msgs/CameraInfo
深度相机校准信息
depth/image_raw
sensor_msgs/Image
深度相机数据
depth_registered/camera_info
sensor_msgs/CameraInfo
配准后的深度相机校准信息
depth_registered/image_raw
sensor_msgs/Image
配准后的深度相机数据
ir/camera_info
sensor_msgs/CameraInfo
红外相机校准信息
ir/image_raw
sensor_msgs/Image
红外相机数据
projector/camera_info
sensor_msgs/CameraInfo
深度相机校准信息
/diagnostics
diagnostic_msgs/DiagnosticArray
传感器诊断信息
Services名称
类型
描述
rgb/set_camera_info
sensor_msgs/SetCameraInfo
设置RGB相机的校准信息
ir/set_camera_info
sensor_msgs/SetCameraInfo
设置红外相机的校准信息
<launch > <include file ="$(find freenect_launch)/launch/freenect.launch" > <arg name ="publish_rf" value ="false" /> <arg name ="depth_registration" value ="true" /> <arg name ="rgb_processing" value ="true" /> <arg name ="ir_processing" value ="false" /> <arg name ="depth_processing" value ="false" /> <arg name ="depth_registered_prossing" value ="true" /> <arg name ="displarity_processing" value ="false" /> <arg name ="displarity_registered_processing" value ="false" /> <arg name ="sw_registered_prossing" value ="false" /> <arg name ="hw_registered_prossing" value ="true" /> </include > </launch >
sudo apt-get install ros-kinetic-rplidar-ros rosrun rplidar_ros rplidarNode rostopic list
项目
名称
类型
描述
Topic发布
scan
sensor_msgs/Laser Scan
发布激光雷达数据
Services
stop_motor
std_srvs/Empty
停止旋转电机
Services
start_motor
std_srvs/Empty
开始旋转电机
参数
类型
默认值
描述
serial_port
string
“/dev/ttyUSB0”
激光雷达串口名称
serial_baudrate
int
115200
串口波特率
frame_id
string
“laser”
激光雷达坐标系
inverted
bool
false
是否倒置安装
angle_compensate
bool
true
角度补偿
增加当前用户的串口权限:sudo gpasswd --add USER_NAME xxx
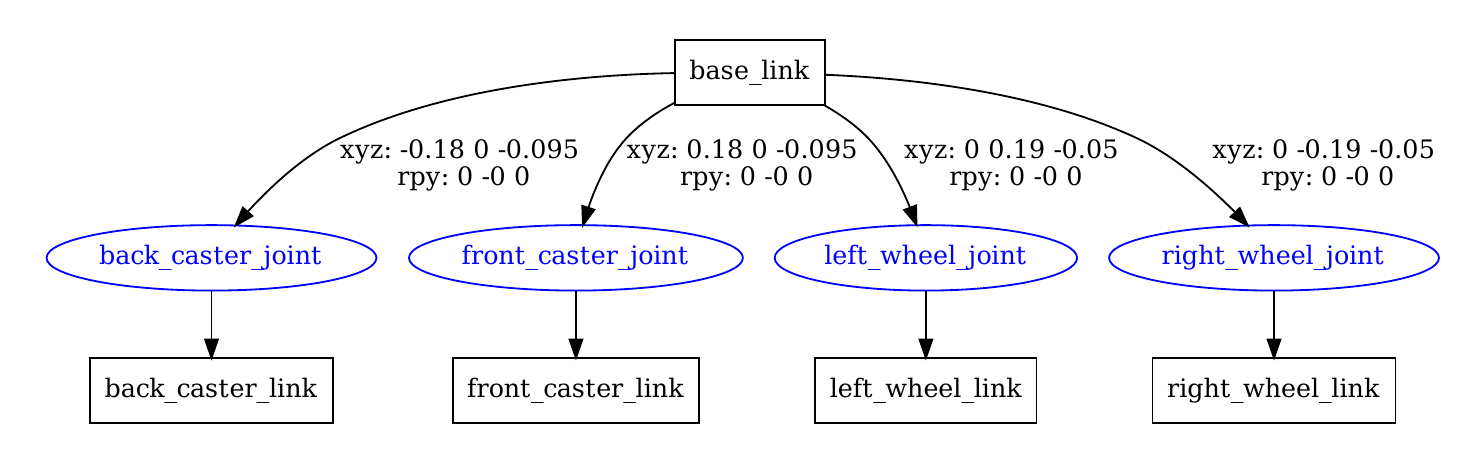
Unified Robot Description Format,同一机器人描述格式,使用XML格式描述机器人模型,有n个连杆link和m个关节joint组成。
<robot name ="robot1" > <link > ..</link > <joint > ..</joint > </robot >
关节类型
描述
continuous
旋转关节,可以围绕单轴无限旋转
revolute
旋转关节,类似于continuous,但有角度极限
prismatic
滑动关节,沿某一轴线移动,带有位置极限
planar
平面关节,允许在平面正交方向上平移和旋转
floating
滑动关节,允许进行平移、旋转
fixed
固定关节,不允许运动的特殊关节
标签
说明
parent
主连接
child
副连接
calibration
关节参考位置,用来校准关节的绝对位置
dynamics
描述关节的物理属性,例如阻尼脂、物理静摩擦力等,经常在动力学仿真中用到
limit
描述运动的一些极限值,包括关节运动的上下限位置、速度限制、力矩限制等
mimc
描述关节与已有关节的关系
safety_controller
描述安全控制器参数
<joint name ="joint1" type ="continuous" > <parent link ="parent_link" /> <child link ="child_link" /> <calibration ... /> <dynamics dampling ... /> <limit effort ... /> </joint >
<launch > <param name ="robot_description" textfile ="$(find mbot_description)/urdf/mbot_base.urdf" /> <param name ="use_gui" value ="true" /> <node name ="joint_state_publisher" pkg ="joint_state_publisher" type ="joint_state_publisher" /> <node name ="robot_state_publisher" pkg ="robot_state_publisher" type ="state_publisher" /> <node name ="rviz" pkg ="rviz" type ="rviz" args ="-d $(find mbot_description)/config/mbot_urdf.rviz" required ="true" /> </launch >
display_mrobot_chassis_urdf.launch文件中,节点robot_state_publisher标签的type写错了,不是type=“state_publisher”,而是type=“robot_state_publisher”
安装:sudo apt-get install liburdfdom-tools
urdf_to_graphiz mbot.urdf
URDF模型文件太过冗长,使用xacro可以精简代码,提供可编程的接口。
官方介绍
定义:<xacro:property name="M_PI" value="3.14159">
使用:<origin xyz="0 0 0" rpy="${M_PI/2} 0 0">
定义:<origin xyz="0 ${(motor_length+wheel_length)/2} 0" rpy="0 0 0">
所有数学运算都会转换为浮点数,以保证运算精度
定义:<xacro:macro name="name" params="A B C"></xacro:macro>
使用:<name A="A_value" B="B_value" C="C_value>"
<xacro:include filename="$(find mbot_description)/urdf/xacro/mbot_base.xacro">
创建模型有两种方法
转换为urdf:rosrun xacro xacro.py mbot.xacro > mbot.urdf
在launch中直接调用xacro文件解析器:<arg name="model" default="$(find xacro)/xacro --inorder'$(find mbot_description)/urdf/xacro/mbot.xacro'" />,<param name="robot_description" command="$(arg model)" />
ArbotiX是一款控制电机、舵机的硬件控制板,提供了ROS的功能包和一个差速器,通过接收速度控制指令,更新机器人里程计状态。wiki
安装:sudo apt-get install ros-indigo-arbotix-*,kinetic需要源码安装:git clone https://github.com/vanadiumlabs/arbotix_ros.git && catkin_make
<node name ="arbotix" pkg ="arbotix_python" type ="arbotix_driver" output ="screen" > <rosparam file ="$(find mbot_description)/config/fake_mbot_arbotix.yaml" command ="load" > <param name ="sim" value ="true" > </node >
创建配置文件:fake_mbot_arbotix.yaml
controllers: { base_controller: { type: diff_controller , base_frame_id: base_footprint , base_width: 0.26 , ticks_meter: 4100 , Kp: 12 , Kd: 12 , Ki: 0 , Ko: 50 , accel_limit: 1.0 } }
roslaunch rbx1_bringup fake_turtlebot.launch roslaunch rbx1_nav fake_amcl.lauch map:test_map.yaml rosrun rviz rviz -d `rospack find rbx1_nav` /amcl.rviz
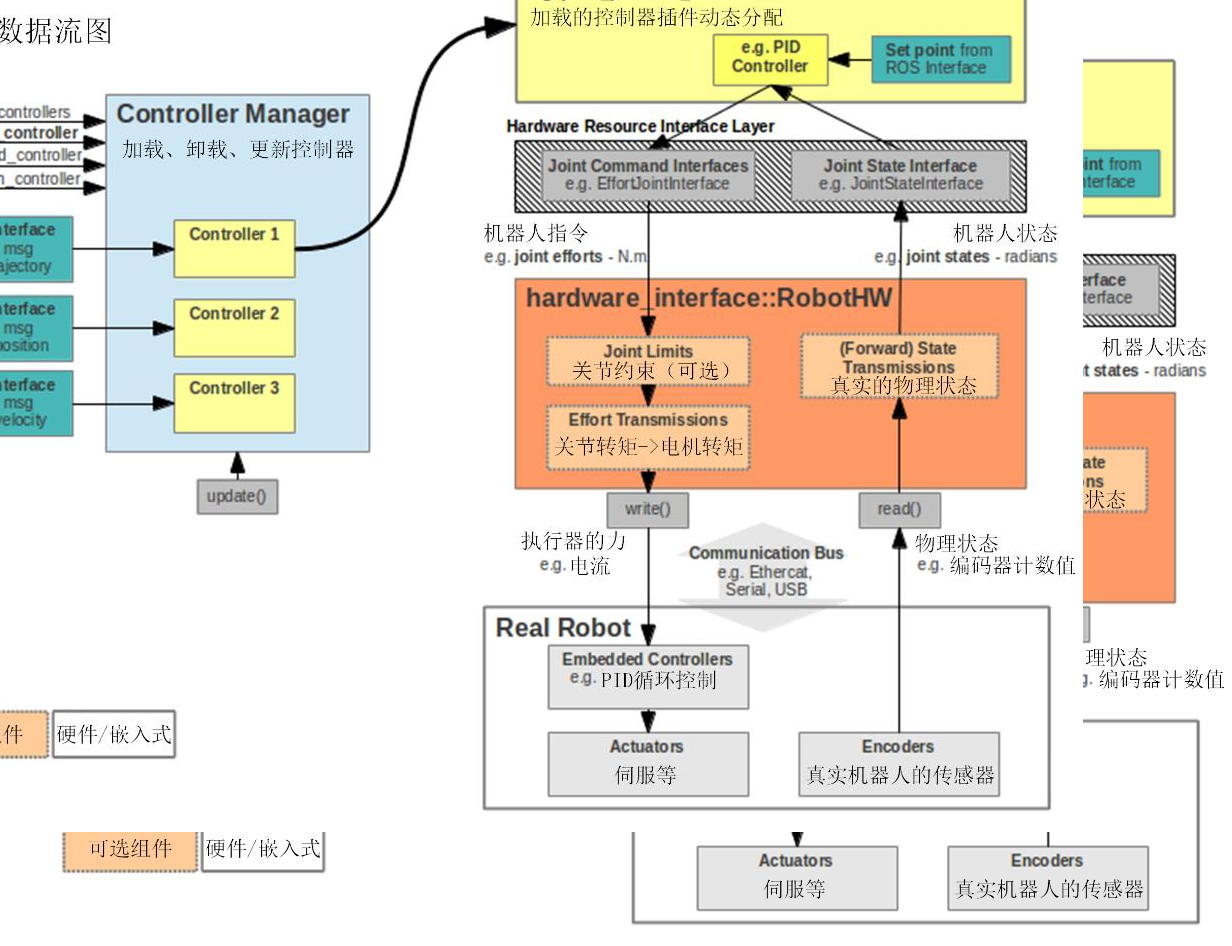
ros_control功能包为开发者提供机器人控制中间件,包含一系列控制接口、传动装置接口、硬件接口、控制器工具等。具体介绍
使用总结
控制器管理器:提供一种通用的接口来管理不同的控制器
控制器:读取硬件状态,发布控制命令,完成每个joint控制
硬件资源:为上下两层提供硬件资源的接口
机器人硬件抽象:机器人硬件抽象和硬件资源直接打交道,通过write和read方式完成硬件操作
真实机器人:执行接收到的命令
<xacro:macro name ="cylinder_inertial_matrix" params ="m r h" > <inertial > <mass value ="${m}" /> <inertia ixx ="${m*(3*r*r+h*h)/12}" ixy = "0" ixz = "0" iyy ="${m*(3*r*r+h*h)/12}" iyz = "0" izz ="${m*r*r/2}" /> </inertial > </xacro:macro > <link name ="${prefix}_wheel_link" > <visual > ...</visual > <collision > <origin xyz ="0 0 0" rpy ="${M_PI/2} 0 0" /> <geometry > <cylinder radius ="${wheel_radius}" length = "${wheel_length}" /> </geometry > </collision > <cylinder_inertial_matrix m ="${wheel_mass}" r ="${wheel_radius}" h ="${wheel_length}" /> </link >
<gazebo reference ="${prefix}_wheel_link" > <material > Gazebo/Gray</material > </gazebo > <gazebo reference ="base_footprint" > <turnGravityOff > false</turnGravityOff > </gazebo >
<transmission name ="${prefix}_wheel_joint_trans" > <type > transmission_interface/SimpleTransmission</type > <joint name ="${prefix}_wheel_joint" > <hardwareInterface > hardware_interface/VelocityJointInterface</hardwareInterface > </joint > <actuator name ="${prefix}_wheel_joint_motor" > <hardwareInterface > hardware_interface/VelocityJointInterface</hardwareInterface > <mechanicalReduction > 1</mechanicalReduction > </actuator > </transmission >
<gazebo > <plugin name ="differential_drive_controller" filename ="libgazebo_ros_diff_drive.so" > <rosDebugLevel > Debug</rosDebugLevel > <publishWheelTF > true</publishWheelTF > <robotNamespace > /</robotNamespace > <publishTf > 1</publishTf > <publishWheelJointState > true</publishWheelJointState > <alwaysOn > true</alwaysOn > <updateRate > 100.0</updateRate > <legacyMode > true</legacyMode > <leftJoint > left_wheel_joint</leftJoint > <rightJoint > right_wheel_joint</rightJoint > <wheelSeparation > ${wheel_joint_y*2}</wheelSeparation > <wheelDiameter > ${2*wheel_radius}</wheelDiameter > <broadcastTF > 1</broadcastTF > <wheelTorque > 30</wheelTorque > <wheelAcceleration > 1.8</wheelAcceleration > <commandTopic > cmd_vel</commandTopic > <odometryFrame > odom</odometryFrame > <odometryTopic > odom</odometryTopic > <robotBaseFrame > base_footprint</robotBaseFrame > </plugin > </gazebo >
仿真的环境搭建有两种方式:
gazebo直接添加默认模型
使用building editor
<launch > <arg name ="paused" default ="false" /> <arg name ="use_sim_time" default ="true" /> <arg name ="gui" default ="true" /> <arg name ="headless" default ="false" /> <arg name ="debug" default ="false" /> <include file ="$(find gazebo_ros)/launch/empty_world.launch" > <arg name ="debug" value ="$(arg debug)" /> <arg name ="gui" value ="$(arg gui)" /> <arg name ="paused" value ="$(arg paused)" /> <arg name ="use_sim_time" value ="$(arg use_sim_time)" /> <arg name ="headless" value ="$(arg headless)" /> </include > <param name ="robot_description" command ="$(find xacro)/xacro --inorder '$(find mbot_description)/urdf/xacro/gazebo/mbot_gazebo.xacro'" /> <node name ="joint_state_publisher" pkg ="joint_state_publisher" type ="joint_state_publisher" > </node > <node name ="robot_state_publisher" pkg ="robot_state_publisher" type ="robot_state_publisher" output ="screen" > <param name ="publish_frequency" type ="double" value ="50.0" /> </node > <node name ="urdf_spawner" pkg ="gazebo_ros" type ="spawn_model" respawn ="false" output ="screen" args ="-urdf -model mrobot -param robot_description" /> </launch >
进入空的环境:roslaunch mbot_gazebo view_mbot_gazebo_empty_world.launch
默认模型需要下载,外网下载过慢,可以提前下载目录:~/.gazebo/models,下载链接
启动仿真环境:roslaunch mbot_gazebo view_mbot_gazebo_play_ground.launch
键盘控制:roslaunch mbot_teleop mbot_teleop.launch
还有摄像头控制、kinect控制、雷达控制等launch示例,可参照古月居的代码
显示图像的类型:roslaunch usb_cam usb_cam-test.launch,rostopic info /usb_cam/image_raw
查看原始图像消息:rosmsg show sensor_msgs/Image
查看压缩图像消息:rosmsg show sensor_msgs/CompressedImage
查看三维图像类型:roslaunch freenect freenect.launch,rostopic info /camera/depth_registered/points
查看三维图像消息:rosmsg show sensor_msgs/PointCloud2
由于摄像头的内部或外部原因,图像会发生畸变,造成误差,通过标定,可以校准获取的图像。
安装标定功能包:sudo apt-get install ros-kinetic-camera-calibration
标定流程:
启动摄像头:roslaunch robot_vision usb_cam.launch
启动标定包:rosrun camera_calibration cameracalibrator.py --size 8X6 --square 0.024 image:=/usb_cam/image_raw camera:=/usb_cam
size:指定棋盘格的内部交点个数
square:对应每个棋盘格的边长,单位米
image、camera:设置摄像头发布的图像话题
在图像界面中移动棋盘格,使X、Y、Size、Skew满足标定的需求,完成后输出标定的值。
image_width: 640 image_height: 480 camera_name: head_camera camera_matrix: rows: 3 cols: 3 data: [514.453865 , 0.000000 , 368.311232 , 0.000000 , 514.428903 , 224.580904 , 0.000000 , 0.000000 , 1.000000 ] distortion_model: plumb_bob distortion_coefficients: rows: 1 cols: 5 data: [0.031723 , -0.045138 , 0.004146 , 0.006205 , 0.000000 ] rectification_matrix: rows: 3 cols: 3 data: [1.000000 , 0.000000 , 0.000000 , 0.000000 , 1.000000 , 0.000000 , 0.000000 , 0.000000 , 1.000000 ] projection_matrix: rows: 3 cols: 4 data: [516.422974 , 0.000000 , 372.887246 , 0.000000 , 0.000000 , 520.513672 , 226.444701 , 0.000000 , 0.000000 , 0.000000 , 1.000000 , 0.000000 ]
启动kinect:roslaunch robot_vision freenect.launch
标定彩色摄像头:rosrun camera_calibration cameracalibrator.py image:=/image/rgb/image_raw camera:=/camera/rgb --size 8x6 --square 0.024
标定红外摄像头:rosrun camera_calibration cameracalibrator.py image:=/image/ir/image_raw camera:=/camera/ir --size 8x6 --square 0.024
<launch > <node name ="usb_cam" pkg ="usb_cam" type ="usb_cam_node" output ="screen" > <param name ="video_device" value ="/dev/video0" /> <param name ="image_width" value ="1280" /> <param name ="image_height" value ="720" /> <param name ="pixel_format" value ="yuyv" /> <param name ="camera_frame_id" value ="usb_cam" /> <param name ="io_method" value ="mmap" /> <param name ="camera_info_url" type ="string" value ="file://$(find robot_vision)/camera_calibration.yaml" /> </node > </launch >
<launch > <include file ="$(find freenect_launch)/launch/freenect.launch" > <arg name ="publish_tf" value ="false" /> <arg name ="depth_registration" value ="true" /> <arg name ="rgb_processing" value ="true" /> <arg name ="ir_processing" value ="false" /> <arg name ="depth_processing" value ="false" /> <arg name ="depth_registered_processing" value ="true" /> <arg name ="disparity_processing" value ="false" /> <arg name ="disparity_registered_processing" value ="false" /> <arg name ="sw_registered_processing" value ="false" /> <arg name ="hw_registered_processing" value ="true" /> <arg name ="rgb_camera_info_url" value ="file://$(find robot_vision)/kinect_rgb_calibration.yaml" /> <arg name ="depth_camera_info_url" value ="file://$(find robot_vision)/kinect_depth_calibration.yaml" /> </include > </launch >
OpenCV是机器视觉中开源计算机视觉库,实现了图像处理和计算机视觉方面的很多通用算法,ROS 也提供了OpenCV的联合调用。
ros安装:sudo apt-get install ros-kinetic-vision-opencv libopencv-dev python-opencv
由于OpenCV的图像数据格式,和ROS不同,中间需要bridge环节将数据进行转换。具体介绍
self.bridge = CvBridge() cv_image = self.bridge.imgmsg_to_cv2(data, "bgr8" ) self.image_pub.publish(self.bridge.cv2_to_imgmsg(cv_image, "bgr8" ))
<launch > <node pkg ="tf" type ="static_transform_publisher" name ="world_to_cam" args ="0 0 0.5 0 1.57 0 world usb_cam 10" /> <arg name ="marker_size" default ="5" /> <arg name ="max_new_marker_error" default ="0.08" /> <arg name ="max_track_error" default ="0.2" /> <arg name ="cam_image_topic" default ="/usb_cam/image_raw" /> <arg name ="cam_info_topic" default ="/usb_cam/camera_info" /> <arg name ="output_frame" default ="/usb_cam" /> <node name ="ar_track_alvar" pkg ="ar_track_alvar" type ="individualMarkersNoKinect" respawn ="false" output ="screen" > <param name ="marker_size" type ="double" value ="$(arg marker_size)" /> <param name ="max_new_marker_error" type ="double" value ="$(arg max_new_marker_error)" /> <param name ="max_track_error" type ="double" value ="$(arg max_track_error)" /> <param name ="output_frame" type ="string" value ="$(arg output_frame)" /> <remap from ="camera_image" to ="$(arg cam_image_topic)" /> <remap from ="camera_info" to ="$(arg cam_info_topic)" /> </node > <node pkg ="rviz" type ="rviz" name ="rviz" args ="-d $(find robot_vision)/config/ar_track_camera.rviz" /> </launch >
ORK(Object Recognition Kitchen),传入3维模板,可以在实际场景中使用kinect进行目标匹配,找到物体和对应位姿。
在官网注册 开发者账号,下载sdk。可以使用sdk与ROS结合实现语音的识别和合成。
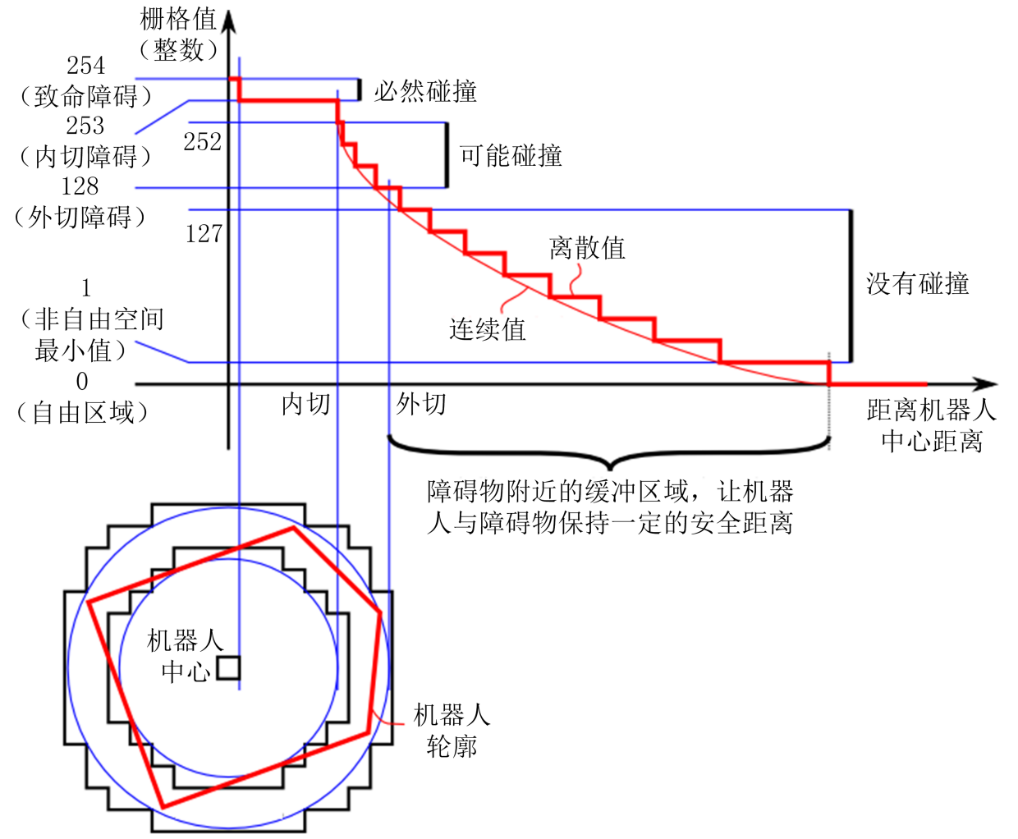
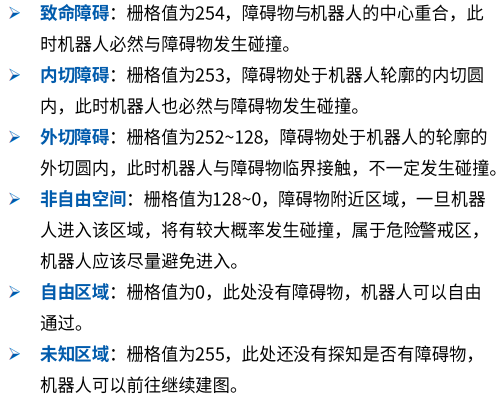
基于激光雷达,Rao-输出Blackwelized粒子滤波算法,二维栅格地图,需要机器人提供历程及信息。输出的topic:nav_msgs/OccupancyGrid
OpenSlam开源了很多的SLAM算法,其中的gmapping被ROS收录,算法介绍可查看链接
类型
名称
类型
描述
topic订阅
tf
tf/tfMessage
用户用于激光雷达坐标系,基坐标系,里程计坐标系之间的变换
topic订阅
scan
sensor_msgs/LaserScan
激光雷达扫描数据
topic发布
map_metadata
nav_msgs/MapMetaData
发布地图Meta数据
topic发布
map
nav_msgs/OccupancyGrid
发布地图栅格数据
topic发布
~entropy
std_msgs/Float64
发布机器人姿态分布熵的估计
service
dynamic_map
nav_msgs/GetMap
获取地图数据
类型
TF变换
描述
必须的TF变换
->base_link 激光雷达坐标系与基坐标系之间的变换,一般由robot_state_publisher或static_transform_publisher发布
必须的TF变换
base_link->odom
基坐标系与里程基坐标系之间的变换,一般由里程计节点发布
发布的TF变换
map->odom
地图坐标系与机器人里程计坐标系之间的变换,估计机器人在地图中的位姿
<launch > <arg name ="scan_topic" default ="scan" /> <node pkg ="gmapping" type ="slam_gmapping" name ="slam_gmapping" output ="screen" clear_params ="true" > <param name ="odom_frame" value ="osdom" /> <param name ="map_update_interval" value ="5.0" /> <param name ="maxRange" value ="5.0" /> <param name ="maxUrange" value ="4.5" /> <param name ="sigma" value ="0.05" /> <param name ="kernelSize" value ="1" /> <param name ="lstep" value ="0.05" /> <param name ="astep" value ="0.05" /> <param name ="iterations" value ="5" /> <param name ="lsigma" value ="0.075" /> <param name ="ogain" value ="3.0" /> <param name ="lskip" value ="0" /> <param name ="srr" value ="0.01" /> <param name ="srt" value ="0.02" /> <param name ="str" value ="0.01" /> <param name ="stt" value ="0.02" /> <param name ="linearUpdate" value ="0.5" /> <param name ="angularUpdate" value ="0.436" /> <param name ="temporalUpdate" value ="-1.0" /> <param name ="resampleThreshold" value ="0.5" /> <param name ="particles" value ="80" /> <param name ="xmin" value ="-1.0" /> <param name ="ymin" value ="-1.0" /> <param name ="xmax" value ="1.0" /> <param name ="ymax" value ="1.0" /> <param name ="delta" value ="0.05" /> <param name ="llsamplerange" value ="0.01" /> <param name ="llsamplestep" value ="0.01" /> <param name ="lasamplerange" value ="0.005" /> <param name ="lasamplestep" value ="0.005" /> <remap from ="scan" to ="$(arg scan_topic)" /> </node > </launch >
使用高斯牛顿的方法进行地图构建,与gmapping不同,不需要里程计数据,只需要激光雷达进行栅格地图的构建,对深度信息依赖比较强,实际效果不如gmapping
输出地图话题:nav_msgs/OccupancyGrid
类型
名称
类型
描述
topic订阅
scan
sensor_msgs/LaserScan
激光雷达扫描的深度数据
topic订阅
syscommand
std_msgs/String
系统命令,如果字符串为reset,地图和机器人姿态重置为初始状态
topic发布
map_metadata
nav_msgs/MapMetaData
发布地图Meta数据
topic发布
map
nav_msgs/OccupancyGrid
发布地图栅格数据
topic发布
poseupdate
geometry_msgs/PoseWithCovarianceStamped
估计机器人姿态(具有高斯的不确定性)
service
dynamic_map
nav_msgs/GetMap
获取地图数据
类型
TF变换
描述
必须的TF变换
->base_link 激光雷达坐标系与基坐标系之间的变换,一般由robot_state_publisher或static_transform_publisher发布
发布的TF变换
map->odom
地图坐标系与机器人里程计坐标系之间的变换,估计机器人在地图中的位姿
<launch > <node pkg = "hector_mapping" type ="hector_mapping" name ="hector_mapping" output ="screen" > <param name ="pub_map_odom_transform" value ="true" /> <param name ="map_frame" value ="map" /> <param name ="base_frame" value ="base_footprint" /> <param name ="odom_frame" value ="odom" /> <param name ="use_tf_scan_transformation" value ="true" /> <param name ="use_tf_pose_start_estimate" value ="false" /> <param name ="map_resolution" value ="0.05" /> <param name ="map_size" value ="2048" /> <param name ="map_start_x" value ="0.5" /> <param name ="map_start_y" value ="0.5" /> <param name ="laser_z_min_value" value = "-1.0" /> <param name ="laser_z_max_value" value = "1.0" /> <param name ="map_multi_res_levels" value ="2" /> <param name ="map_pub_period" value ="2" /> <param name ="laser_min_dist" value ="0.4" /> <param name ="laser_max_dist" value ="5.5" /> <param name ="output_timing" value ="false" /> <param name ="pub_map_scanmatch_transform" value ="true" /> <param name ="update_factor_free" value ="0.4" /> <param name ="update_factor_occupied" value ="0.7" /> <param name ="map_update_distance_thresh" value ="0.2" /> <param name ="map_update_angle_thresh" value ="0.06" /> <param name ="advertise_map_service" value ="true" /> <param name ="scan_subscriber_queue_size" value ="5" /> <param name ="scan_topic" value ="scan" /> </node > </launch >
2016年谷歌开源的基于图网络的优化方法在二维或三维条件下的定位及建图功能包,主要基于激光雷达
安装
说明
安装工具
sudo apt-get updatesudo apt-get install -y python-wstool python-rosdep ninja-build
初始化工作空间
cd catkin_goole_wswstool init src
设置下载地址
wstool merge -t src https://raw.githubusercontent.com/googlecartographer/cartographer_ros/master/cartopgrapher_ros.rosinstallwstool update -t src
下载功能包
rosdep updaterosdep install --from-paths src --ignore-src --rosdistro=${ROS_DISTRO} -y
编译功能包
catkin_make_isolated --install --use-ninjasource install_isolated/setup.bash
demo演示
启动demo演示:wget -P ~/Downloads https://storage/googleapis.com/cartographer-public-data/bags/backpack_2d/cartographer_paper_deutsches_museum.bag,roslaunch cartographer_ros demo_backpack_2d.launch bag_filename:=~/Downloads/cartographer_paper_deutsches_museum.bag
启动3D slam demo演示:wget -P ~/Downloads https://storage/googleapis.com/cartographer-public-data/bags/backpack_3d/b3-2016-04-05-14-14-00.bag,roslaunch cartographer_ros demo_backpack_3d.launch bag_filename:=~/Downloads/b3-2016-04-05-14-14-00.bag
启动Revo LDS demo演示:wget -P ~/Downloads https://storage/googleapis.com/cartographer-public-data/bags/revo_lds/cartographer_paper_revo_lds.bag,roslaunch cartographer_ros demo_revo_lds.launch bag_filename:=~/Downloads/cartographer_paper_revo_lds.bag
启动PR2 demo演示:wget -P ~/Downloads https://storage/googleapis.com/cartographer-public-data/bags/pr2/2011-09-15-08-32-46.bag,roslaunch cartographer_ros demo_pr2.launch bag_filename:=~/Downloads/2011-09-15-08-32-46.bag
配置节点
<launch > <param name ="/use_sim_time" value ="true" /> <node name ="cartographer_node" pkg ="cartographer_ros" type ="cartographer_node" args =" -configuration_directory $(find cartographer_ros)/configuration_files -configuration_basename rplidar.lua" output ="screen" > <remap from ="scan" to ="scan" /> </node > <node name ="rviz" pkg ="rviz" type ="rviz" required ="true" args ="-d $(find cartographer_ros)/configuration_files/demo_2d.rviz" /> </launch >
基于特征点的实时单目SLAM系统,实时解算摄像机的移动轨迹,构建三维点云地图,不仅使用手持设备,也可用户汽车行驶过程中获取的连续图像
Raul Mur-Artal, J. M. M. Montiel和Juan D. Tardos于2015年发表在IEEE Transactions on Robotics上
安装
说明
安装工具和源码
sudo apt-get install libboost-all-dev libblas-dev liblapck-devgit clone https://github.com/raulmur/ORB_SLAM2.git
安装eigen3.2
下载链接 mkdir build && cd build &&cmake.. && make && make install
安装g2o
cd ORB_SLAM-master/Thirdparty/g2omkdir build && cd build &&cmake.. -DCMAKE_BUILD_TYPE=Release&& make
编译DBow2
cd ORB_SLAM-master/Thirdparty/DBoW2mkdir build && cd build &&cmake.. -DCMAKE_BUILD_TYPE=Release&& make
编译ORB_SLAM
cd ORB_SLAM && mkdir build && cd build &&cmake.. -DCMAKE_BUILD_TYPE=Release&& make
编译功能包
export ROS_PACKAGE_PATH=${ROS_PACKAGE_PATH}:ORB_SLAM_PATH/ORB_SLAM2/Examples/ROSchmod +x build_ros.sh && ./build_ros.sh && source ORB_SLAM2/Examples/ROS/ORB_SLAM2/build/devel/setup.bash
demo
单目SLAM示例:rosrun ORB_SLAM2 Mono Vocabulary/ORBvoc.txt Examples/ROS/ORB_SLAM2/Asus.yaml,rosbag play rgbd_dataset_freiburg1_desk.bag /camera/rgb/image_color:=/camera/image_raw,Vocabulary参数算法文件在ORBSLAM2/Vocabulary中,Asus.yaml相机参数设置文件,也可以对camera进行标注产生
AR示例:rosrun ORB_SLAM2 MonoAR Vocabulary/ORBvoc.txt Examples/ROS/ORB_SLAM2/Asus.yaml,rosbag play rgbd_dataset_freiburg1_desk.bag /camera/rgb/image_color:=/camera/image_raw
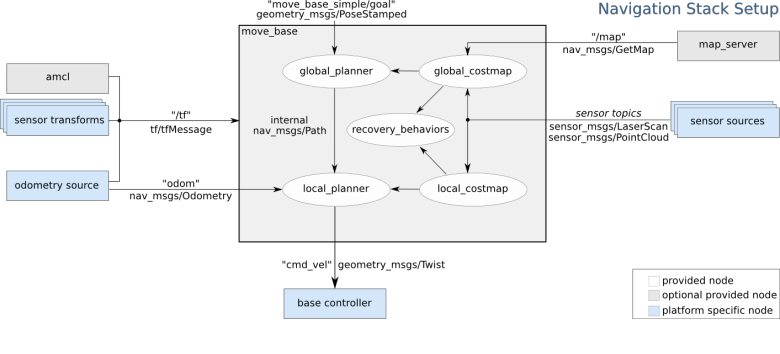
全局路径规划:全局最优路径规划、Dijkstra或A*算法
本地实时规划:
规划机器人每个周期内的线速度、角速度,尽量符合全局最优路径
实时避障
Trajectory Rollout和Dynamic Window Approaches算法
搜索躲避和行进的多条路径,综合各评价标准选择最优路径
蒙特卡洛定位算法,二维环境定位,针对已有地图使用例子滤波器跟踪一个机器人的姿态
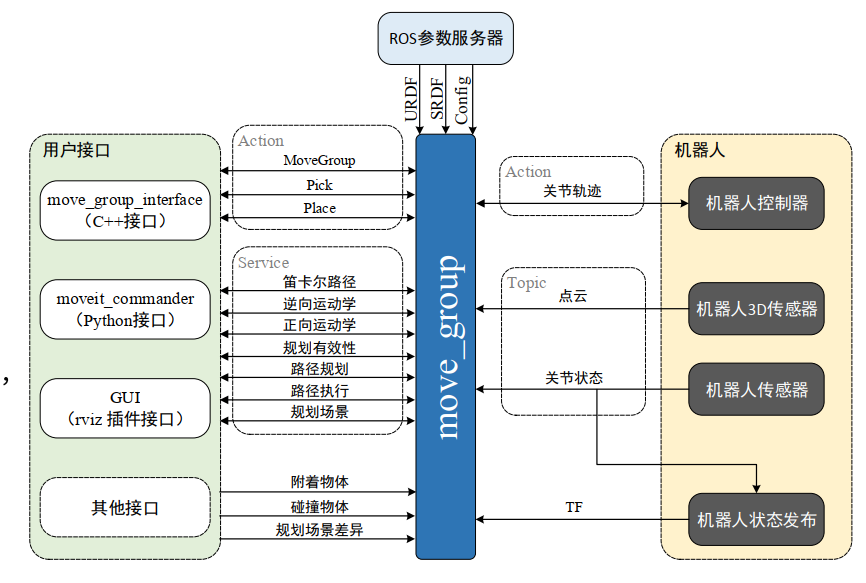
moveit是一个集成化的开发平台,由一系列操作的功能包组成,包括路径规划、操作控制、3D感知、运动学、控制与导航算法,提供友好的GUI,方便的应用于工业领域。