
MPC简介
介绍
车辆运动学
数学模型
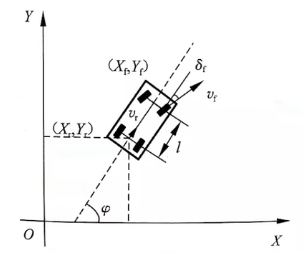
- 只考虑车辆在二维平面(
xoy)上运动 - 状态量(states):
x,y,$\phi$ - 控制量(control):
$v_r$,$\delta_f$。即:脚踏板(pedals),转向(st+eering wheel)- rear,front
状态空间[1]
-
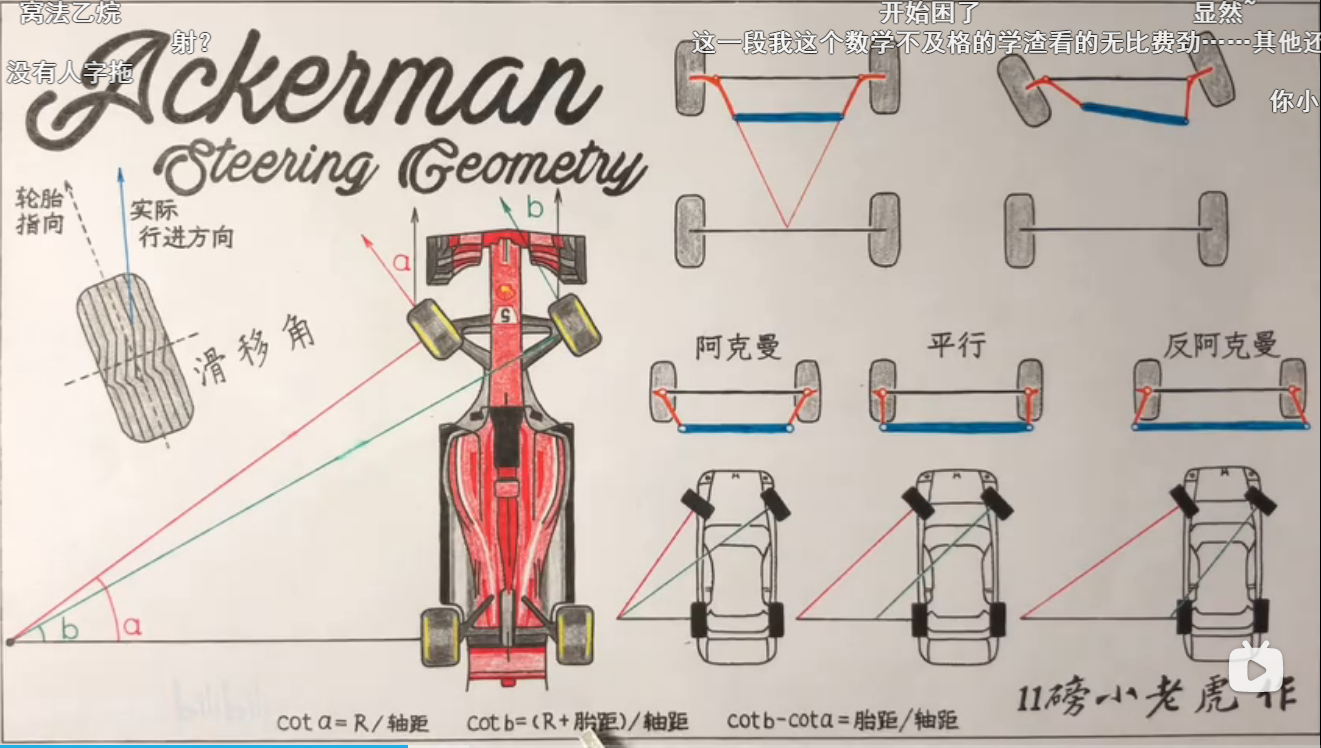
前轮左右两个轮的转角有一个差值,叫做阿克曼转向,可以保证转向外侧和内侧走过的圆弧圆心,在后轮两中心延长线的一个点上。此时模型可以简化为自行车的两轮模型。
-
$v_f\cos{\delta_f}=v_r$:前轮速度与后轮速度在径向上的约束 -
$v_f\sin{\delta_f}=v_y$:横向速度 -
$v_y=v_r\tan{\delta_f}$ -
$\varphi=\frac{v_r\tan{\delta_f}}{l}$$\omega=\frac{v_y}{l}$:角速度的线速度/半径
-
状态空间:
$\xi=\begin{bmatrix}X\\Y\\\varphi\end{bmatrix}$ -
控制空间:
$u=\begin{bmatrix}v_r\\\delta_f\end{bmatrix}$ -
非线性
线性化
-
将变量相乘的非线性关系,转化为线性关系。直接转换做不到,可以使用参考值与实际值的差值来计算
-
由前面已知关系:
$\begin{cases}\dot{X}=v_r\cos{\varphi}=f_1\\\dot{Y}=v_r\sin{\varphi}=f_2\\\dot{\varphi}=\frac{v_r\tan{\delta_f}}{l }=f_3\\\end{cases}$$\dot{X}$表示大地坐标系下瞬时的水平坐标变化,也就是导数
-
假设状态向量符合函数关系:
$\dot{\xi}=f(\xi,u)$ -
根据近似线性化(相对应的是反馈线性化,缺点是通用性不好,不同模型都要重新推导),在参考点(
$\xi_r$)处利用泰勒展开
- 泰勒公式
$f(x)=\frac{f(x_0)}{0!}+\frac{f'(x_0)}{1!}(x-x_0)+\dots+\frac{f^{(n)}(x_0)}{n!}(x-x_0)^n+R_0(x)$- 对于一阶泰勒展开,需要计算导数,在向量空间求导,可以求解雅克比矩阵
$J_f(x_1,\dots,x_n)=\begin{bmatrix}\frac{\partial{y_1}}{\partial{x_1}}&&\dots&&\frac{\partial{y_1}}{\partial{x_n}}\\\vdots&&\ddots&&\vdots\\\frac{\partial{y_m}}{\partial{x_1}}&&\dots&&\frac{\partial{y_m}}{\partial{x_n}}\end{bmatrix}$
-
$\dot{\xi}=f(\xi,u)\approx f(\xi_r,u_r)+J_x(\xi-\xi_r)+J_u(u-u_r)= f(\xi_r,u_r)+\frac{\partial f}{\partial \xi}(\xi-\xi_r)+\frac{\partial f}{\partial u}(u-u_r)$ -
用
$\tilde{\xi}=\xi-\xi_r$表示误差 -
一阶泰勒展开与参考状态相减
$\dot{\xi_r}=f(\xi_r,u_r)$,得到两个雅克比矩阵 -
$\dot{\tilde{\xi}}=\dot{\xi}-\dot{\xi_r}=\frac{\partial f}{\partial \xi}\tilde{\xi}+\frac{\partial f}{\partial u}\tilde{u}=A\tilde{\xi}+B\tilde{u}$,此时状态和控制表示为了线性关系- 其中:
$\tilde{\xi}=\begin{bmatrix}x-x_r\\y-y_r\\\varphi-\varphi_r\end{bmatrix}$ $\tilde{u}=\begin{bmatrix}v_r\\\delta_f\end{bmatrix}$- 利用雅克比矩阵,求A:
$A=\frac{\partial f}{\partial \xi}=\begin{bmatrix}\frac{\partial{f_1}}{\partial{\xi_1}}&&\frac{\partial{f_1}}{\partial{\xi_2}}&&\frac{\partial{f_1}}{\partial{\xi_3}}\\\frac{\partial{f_2}}{\partial{\xi_1}}&&\frac{\partial{f_2}}{\partial{\xi_2}}&&\frac{\partial{f_2}}{\partial{\xi_3}}\\\frac{\partial{f_3}}{\partial{\xi_1}}&&\frac{\partial{f_3}}{\partial{\xi_2}}&&\frac{\partial{f_3}}{\partial{\xi_3}}\end{bmatrix}=\begin{bmatrix}0&&0&&-v_r\sin{\varphi_r}\\0&&0&&v_r\sin{\varphi_r}\\0&&0&&0\end{bmatrix}$ $B=\frac{\partial f}{\partial u}=\begin{bmatrix}\frac{\partial{f_1}}{\partial{u_1}}&&\frac{\partial{f_1}}{\partial{u_2}}\\\frac{\partial{f_2}}{\partial{u_1}}&&\frac{\partial{f_2}}{\partial{u_2}}\\\frac{\partial{f_3}}{\partial{u_1}}&&\frac{\partial{f_3}}{\partial{u_2}}\end{bmatrix}=\begin{bmatrix}\cos{\varphi_r}&&0\\\sin{\varphi_r}&&0\\\frac{\tan\delta_f}{l}&&\frac{v_r}{l\cos^2\delta_f}\end{bmatrix}$
- 其中:
离散化
-
使用前向欧拉(Forward-Euler)做近似化
-
$\dot{\tilde{\xi}}=\frac{\tilde{\xi}(k+1)-\tilde{\xi}(k)}{T}=A\tilde{\xi}(k)+B\tilde{u}(k)$ -
$\tilde{\xi}(k+1)=(I+TA)\tilde{\xi}(k)+(TB)\tilde{u}(k)=\tilde{A}\tilde{\xi}(k)+\tilde{B}\tilde{u}(k)$- 其中:
$\tilde{A}=I+TA=\begin{bmatrix}1&&0&&-Tv_r\sin{\varphi_r}\\0&&1&&Tv_r\sin{\varphi_r}\\0&&0&&1\end{bmatrix}$ $\tilde{B}=TB=\begin{bmatrix}T\cos{\varphi_r}&&0\\T\sin{\varphi_r}&&0\\\frac{T\tan\delta_f}{l}&&\frac{Tv_r}{l\cos^2\delta_f}\end{bmatrix}$
- 其中:
-
至此,我们得到了线性时变的状态空间
组合
- 状态和控制进行组合
$\begin{cases}\xi(k+1)=\tilde{A}\xi(k)+\tilde{B}\triangle u(k)\\\eta(k)=\tilde{C}\xi(k)\end{cases}$- 其中:
$\xi(k)=\begin{bmatrix}\tilde{x}(k)\\\tilde{u}(k-1)\end{bmatrix}$ $\tilde{x}(k)=x(k)-x_r(k)$,表示k时刻状态与参考值的偏差
- 其中:
- 带入到公式中,可得
$\triangle u(k)=\tilde{u}(k)-\tilde{u}(k-1)=u(k)-u_r(k)-u(k-1)+u_r(k-1)$$u(k)=u_r(k)+(u(k-1)-u_r(k-1))+\triangle u$- 其中
$u(k)$是最终控制量,$u_r(k)$是参考控制量,$(u(k-1)-u_r(k-1))$是历史控制量,$\triangle u$最优化得到的控制量。
预测
-
根据状态空间,我们可以推出以下关系:
-
$\tilde{\xi}(k+1)=\tilde{A}\tilde{\xi}(k)+\tilde{B}\tilde{u}(k)$ -
$\tilde{\xi}(k+2)=\tilde{A}^2\tilde{\xi}(k)+\tilde{A}\tilde{B}\tilde{u}(k)+\tilde{B}\tilde{u}(k+1)$ -
$\tilde{\xi}(k+3)=\tilde{A}^3\tilde{\xi}(k)+\tilde{A}^2\tilde{B}\tilde{u}(k)+\tilde{A}\tilde{B}\tilde{u}(k+1)+\tilde{B}\tilde{u}(k+2)$ -
$\cdots$- 预测时域:当
$N_p=4$时,可以得到$\tilde{\xi}(k+1)\; \tilde{\xi}(k+2)\; \tilde{\xi}(k+3)\; \tilde{\xi}(k+4)$四个状态空间 - 控制时域:当
$N_c=3$时,已知$\tilde{u}(k+1)\;\tilde{u}(k+2)\;\tilde{u}(k+3)$三个控制空间
- 预测时域:当
-
简写为:
$Y=\Psi\xi(k)+\Theta\triangle u(k)$- 其中:
$Y=\begin{bmatrix}\tilde{\xi}(k+1)\\\cdots\\\tilde{\xi}(k+N_p)\end{bmatrix}$ $\Psi=\begin{bmatrix}\tilde{A}\\\tilde{A}^2\\\cdots\\\tilde{A}^{N_p}\end{bmatrix}$$\xi(k)=\begin{bmatrix}\tilde{x_k}\\\tilde{y_k}\\\tilde{\varphi_k}\end{bmatrix}$$\Theta=\begin{bmatrix}\tilde{B}&&0&&\cdots&&\cdots\\\tilde{A}\tilde{B}&&\tilde{B}&&0&&\cdots\\\vdots&&\vdots&&\vdots&&\vdots\\\tilde{A}^{N_p-1}\tilde{B}&&\cdots&&\cdots&&\tilde{B}\end{bmatrix}$,此时为$N_p=N_c+1$的情况,当$N_p>N_c+1$时,后面的系数为0,即不考虑控制情况$U=\begin{bmatrix}u(k)\\u(k+1)\\\vdots\\u(k+N_c)\end{bmatrix}$
- 其中:
优化
-
根据控制规律,使用HSL求解最优化问题。
-
目标:1)尽快收敛到参考值:
$Y->Y_r$;2)控制输入尽可能小:$\min{U}$ -
求解就是让目标的偏差最小,使用加权平方和调整不同的值。
-
想要轨迹尽量满足参考值:
$\begin{bmatrix}x_1->x_{1ref}\\y_1->y_{1ref}\\\varphi_1->\varphi_{1ref}\\\cdots\\x_{N_p}->x_{N_pref}\\y_{N_p}->y_{N_pref}\\\varphi_1->\varphi_{1ref}\\\end{bmatrix}$ -
构建损失函数:
$L=(Y-Y_r)^TQ(Y-Y_r)+U^TRT$ -
由于我们只能控制变量U,所以上面的损失函数现阶段无法全部控制。
-
定义偏差:
$E=\Psi\xi-\Psi\xi_r=\Psi\xi-Y_{ref}$- 预测公式为:
$Y=\Psi\xi(k)+\Theta u(k)$ - 可得:
$Y-Y_{ref}=E+\Theta U$
- 预测公式为:
-
损失函数可变化为:
$L=E^TQE+(\Theta U)^TQ(\Theta U)+2E^TQ(\Theta U)+U^TRU$- 其中第一项没有U,可以当做控制函数的常数
-
$L=U^T(\Theta^TQ\Theta+R)U+2E^2Q\Theta U$ -
可以构建为二次规划问题:
$\begin{cases}\min&&\frac{1}{2}U^THU+f^TU\\s.t. &&lb\leq U\leq ub\end{cases}$ -
最终可得U的各时刻的输出
$U=\begin{bmatrix}u(k)\\u(k+1)\\\cdots\\u(k+N_c)\end{bmatrix}$。
松弛因子的引入
- 代价函数:$L=\sum\|\eta-\eta_r\|^2_Q+\sum\|u\|^2_R+\rho\epsilon^2$ |
|---|
反馈控制
-
与传统控制方式不同,MPC通过优化求解出控制向量后,系统状态更新再得到预测,再根据预测得到新的控制向量,不断迭代。
-
$u(k)=u_r(k)+(u(k-1-u_r(k-1))+\triangle u(k)$
代码
- tonyxxq/MPC-Control
- PythonRobotics/cubic_spline_planner.py
- udacity官方:CarND-MPC-Project/install_Ipopt_CppAD.md at master
- 安装方式